Разработка системы управления двигателем автомобиля – это сложный и многогранный процесс, требующий глубоких знаний в области мехатроники, электроники и программного обеспечения. Современные системы управления двигателем (ECU) отвечают за оптимизацию работы двигателя внутреннего сгорания, обеспечивая максимальную эффективность, минимальный уровень выбросов и комфортное вождение. Эта статья подробно рассмотрит все этапы разработки ECU, от проектирования архитектуры до финального тестирования и внедрения, а также коснется перспективных направлений развития в этой области.
Этапы Разработки Системы Управления Двигателем
1. Определение Требований и Спецификаций
Первый и, пожалуй, самый важный этап – это определение четких и измеримых требований к системе управления двигателем. Эти требования должны учитывать:
- Тип двигателя: Бензиновый, дизельный, гибридный и т.д. Каждый тип двигателя имеет свои особенности, которые необходимо учитывать при разработке ECU.
- Экологические нормы: Система должна соответствовать действующим экологическим стандартам (Евро-6, Tier 3 и т.д.).
- Требования к производительности: Максимальная мощность, крутящий момент, время разгона и другие параметры, которые должны быть достигнуты.
- Требования к топливной экономичности: Система должна обеспечивать минимальный расход топлива в различных режимах работы.
- Требования к надежности и безопасности: Система должна быть надежной и безопасной в эксплуатации, а также устойчивой к различным внешним воздействиям.
- Функциональные требования: Управление зажиганием, впрыском топлива, системой рециркуляции отработавших газов (EGR), системой изменения фаз газораспределения (VVT) и другими подсистемами двигателя.
На основе этих требований разрабатываются детальные спецификации, описывающие функциональность, производительность и интерфейсы ECU.
2. Проектирование Архитектуры Системы
После определения требований необходимо спроектировать архитектуру системы управления двигателем. Архитектура включает в себя аппаратную и программную части.
Аппаратная Архитектура
Аппаратная часть ECU обычно состоит из следующих компонентов:
- Микроконтроллер: Ядро системы, отвечающее за обработку данных и управление периферийными устройствами. Выбор микроконтроллера зависит от требуемой производительности, объема памяти и доступных интерфейсов.
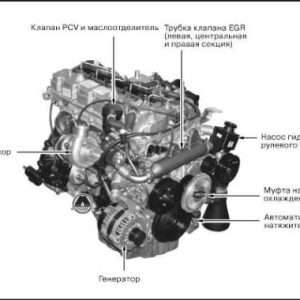
- Датчики: Датчики температуры, давления, положения коленчатого вала, расхода воздуха и другие, которые предоставляют информацию о состоянии двигателя и окружающей среды.
- Исполнительные механизмы: Форсунки, катушки зажигания, клапаны EGR, дроссельная заслонка и другие, которые управляются ECU для регулирования работы двигателя.
- Интерфейсы связи: CAN, LIN, Ethernet и другие, которые используются для обмена данными с другими системами автомобиля.
- Схема питания и защиты: Обеспечивает стабильное питание всех компонентов ECU и защиту от перенапряжения, короткого замыкания и других нештатных ситуаций.
Программная Архитектура
Программная часть ECU обычно состоит из следующих слоев:
- Базовое программное обеспечение (BSW): Обеспечивает низкоуровневое управление аппаратными ресурсами, такими как память, таймеры и интерфейсы. Часто используется AUTOSAR (Automotive Open System Architecture) для стандартизации BSW.
- Прикладное программное обеспечение: Реализует основные функции управления двигателем, такие как управление зажиганием, впрыском топлива, системой EGR и т.д.
- Операционная система реального времени (RTOS): Обеспечивает планирование задач и управление ресурсами в режиме реального времени.
- Диагностическое программное обеспечение: Обеспечивает диагностику неисправностей и мониторинг состояния системы.
3. Разработка Алгоритмов Управления
Разработка алгоритмов управления – это ключевой этап, определяющий эффективность и производительность системы управления двигателем. Алгоритмы управления должны обеспечивать:
- Оптимальное соотношение воздух/топливо (AFR): Поддержание оптимального AFR для обеспечения максимальной эффективности и минимального уровня выбросов.
- Оптимальный угол опережения зажигания: Регулировка угла опережения зажигания для обеспечения максимальной мощности и предотвращения детонации.
- Управление дроссельной заслонкой: Регулировка положения дроссельной заслонки для управления мощностью двигателя и обеспечения комфортного вождения.
- Управление системой EGR: Регулировка количества рециркулирующих отработавших газов для снижения выбросов NOx.
- Управление системой VVT: Регулировка фаз газораспределения для оптимизации работы двигателя в различных режимах.
Для разработки алгоритмов управления используются различные методы, такие как:
- Математическое моделирование: Создание математической модели двигателя для анализа его поведения и разработки оптимальных алгоритмов управления.
- Экспериментальные исследования: Проведение экспериментов на реальном двигателе для определения оптимальных параметров управления.
- Методы машинного обучения: Использование методов машинного обучения для адаптации алгоритмов управления к изменяющимся условиям эксплуатации.
4. Разработка Программного Обеспечения
После разработки алгоритмов управления необходимо разработать программное обеспечение для ECU. Разработка программного обеспечения включает в себя:
- Написание кода: Реализация алгоритмов управления на языке программирования C или C++.
- Тестирование кода: Проверка кода на наличие ошибок и соответствие требованиям.
- Интеграция кода: Интеграция различных модулей программного обеспечения в единую систему.
- Верификация и валидация: Проверка соответствия программного обеспечения требованиям и спецификациям.
При разработке программного обеспечения необходимо учитывать требования к реальному времени, надежности и безопасности. Часто используются специализированные инструменты и среды разработки, такие как dSPACE TargetLink, MathWorks Simulink и Vector CANoe.
5. Тестирование и Валидация
Тестирование и валидация – это важный этап, позволяющий убедиться в правильности работы системы управления двигателем. Тестирование включает в себя:
- Тестирование на уровне компонентов: Проверка работы отдельных компонентов ECU, таких как датчики, исполнительные механизмы и интерфейсы.
- Тестирование на уровне системы: Проверка работы ECU в целом на стенде с двигателем или на реальном автомобиле.
- Тестирование в различных условиях эксплуатации: Проверка работы ECU в различных климатических условиях, на различных дорогах и при различных стилях вождения.
- Регрессионное тестирование: Проверка того, что внесенные изменения в программное обеспечение не привели к появлению новых ошибок или ухудшению работы системы.
В процессе тестирования выявляются ошибки и недостатки, которые устраняются путем внесения изменений в программное обеспечение или аппаратную часть. Валидация – это процесс подтверждения того, что система соответствует требованиям и спецификациям.
6. Внедрение и Калибровка
После успешного завершения тестирования и валидации система управления двигателем внедряется в автомобиль. Внедрение включает в себя:
- Установку ECU в автомобиль: Монтаж ECU в соответствии с конструкторской документацией.
- Подключение ECU к датчикам и исполнительным механизмам: Подключение ECU к датчикам и исполнительным механизмам с помощью проводки и разъемов.
- Калибровку ECU: Настройку параметров управления двигателем для конкретной модели автомобиля и условий эксплуатации.
Калибровка – это процесс оптимизации параметров управления двигателем для достижения максимальной эффективности, минимального уровня выбросов и комфортного вождения. Калибровка выполняется с использованием специализированного программного обеспечения и оборудования, такого как ETAS INCA или Vector CANape.
Перспективные Направления Развития
1. Использование Искусственного Интеллекта и Машинного Обучения
Искусственный интеллект (ИИ) и машинное обучение (МО) открывают новые возможности для разработки более эффективных и адаптивных систем управления двигателем. С помощью ИИ и МО можно:
- Оптимизировать параметры управления в режиме реального времени: Адаптировать параметры управления двигателем к изменяющимся условиям эксплуатации, таким как температура окружающей среды, высота над уровнем моря и стиль вождения.
- Прогнозировать неисправности: Анализировать данные с датчиков для прогнозирования неисправностей и предотвращения аварийных ситуаций.
- Разрабатывать самообучающиеся алгоритмы управления: Создавать алгоритмы управления, которые могут самостоятельно обучаться на основе данных, полученных в процессе эксплуатации.
2. Разработка Систем Управления для Электрических и Гибридных Двигателей
С ростом популярности электрических и гибридных автомобилей возникает необходимость в разработке новых систем управления, которые учитывают особенности этих типов двигателей. Системы управления для электрических и гибридных двигателей должны обеспечивать:
- Оптимальное управление электромотором: Регулировка крутящего момента, скорости вращения и напряжения электромотора для обеспечения максимальной эффективности и производительности.
- Управление батареей: Мониторинг состояния батареи, управление зарядкой и разрядкой, а также защита от перегрева и перезаряда.
- Управление гибридной силовой установкой: Координация работы двигателя внутреннего сгорания и электромотора для обеспечения оптимальной топливной экономичности и производительности.
3. Использование Облачных Технологий
Облачные технологии позволяют собирать и анализировать данные с большого количества автомобилей, что может быть использовано для:
- Улучшения алгоритмов управления: Анализ данных с автомобилей для выявления закономерностей и разработки более эффективных алгоритмов управления.
- Удаленной диагностики и обновления программного обеспечения: Удаленная диагностика неисправностей и обновление программного обеспечения ECU.
- Предоставления персонализированных услуг: Предоставление персонализированных услуг на основе данных о стиле вождения и условиях эксплуатации.
4. Интеграция с Автономными Системами Вождения
С развитием автономных систем вождения возникает необходимость в интеграции систем управления двигателем с этими системами. Интеграция позволит:
- Оптимизировать работу двигателя для автономного вождения: Адаптировать параметры управления двигателем к требованиям автономной системы вождения.
- Повысить безопасность: Обеспечить безопасную и надежную работу двигателя в условиях автономного вождения.
- Улучшить комфорт: Обеспечить комфортное вождение в автономном режиме.
Разработка системы управления двигателем – это сложный и постоянно развивающийся процесс. Новые технологии и требования рынка стимулируют инновации в этой области, что приводит к появлению более эффективных, надежных и экологически чистых систем управления двигателем.
Описание: Изучите процесс разработки системы управления двигателем автомобиля, от проектирования до внедрения. Узнайте о ключевых этапах разработки системы управления двигателем.
Современная разработка системы управления двигателем (ECU) для автомобиля представляет собой сложный и многоэтапный процесс, требующий глубоких знаний в области электроники, механики, программирования и управления. Это не просто набор алгоритмов, а интегрированная система, обеспечивающая оптимальную работу двигателя внутреннего сгорания (ДВС) в различных условиях эксплуатации. От эффективности ECU напрямую зависят такие параметры, как мощность двигателя, топливная экономичность, уровень выбросов вредных веществ и общая надежность автомобиля. В данной статье мы подробно рассмотрим все этапы разработки ECU, начиная от формирования требований и заканчивая тестированием и внедрением.
I. Этап 1: Определение Требований и Спецификаций
A. Анализ Требований к Двигателю
Первым шагом в разработке ECU является тщательный анализ требований к двигателю, для которого он предназначен. Этот анализ включает в себя определение типа двигателя (бензиновый, дизельный, гибридный), его характеристик (объем, мощность, крутящий момент), а также целевого применения (легковой автомобиль, грузовик, специальная техника). Также необходимо учитывать экологические нормы и стандарты (Евро-6, Tier 4 и т.д.), которым должен соответствовать двигатель. В результате анализа формируется перечень функциональных требований, определяющих, какие задачи должен выполнять ECU.
На основе анализа требований к двигателю разрабатываются детальные спецификации ECU. Эти спецификации описывают:
- Функциональные требования: Управление зажиганием, впрыском топлива, системой рециркуляции отработавших газов (EGR), системой изменения фаз газораспределения (VVT), системой турбонаддува и другими подсистемами двигателя.
- Требования к производительности: Время отклика, точность управления, стабильность работы в различных режимах.
- Требования к безопасности: Защита от перенапряжения, короткого замыкания, перегрева и других нештатных ситуаций.
- Требования к интерфейсам: Протоколы связи (CAN, LIN, Ethernet), типы датчиков и исполнительных механизмов.
- Требования к надежности: Срок службы, устойчивость к вибрациям, температурным перепадам и другим внешним воздействиям.
II. Этап 2: Проектирование Архитектуры ECU
Аппаратная архитектура ECU включает в себя выбор микроконтроллера, датчиков, исполнительных механизмов и других электронных компонентов. Ключевым элементом является микроконтроллер, который отвечает за обработку данных, управление периферийными устройствами и выполнение алгоритмов управления. Выбор микроконтроллера зависит от требуемой производительности, объема памяти, количества интерфейсов и других факторов. Датчики предоставляют информацию о состоянии двигателя и окружающей среды, а исполнительные механизмы управляют работой двигателя в соответствии с командами ECU.
Программная архитектура ECU определяет структуру программного обеспечения и взаимодействие между различными модулями. Обычно программное обеспечение ECU состоит из нескольких слоев:
- Базовое программное обеспечение (BSW): Обеспечивает низкоуровневое управление аппаратными ресурсами, такими как память, таймеры и интерфейсы. Часто используется AUTOSAR (Automotive Open System Architecture) для стандартизации BSW.
- Операционная система реального времени (RTOS): Обеспечивает планирование задач и управление ресурсами в режиме реального времени.
- Прикладное программное обеспечение: Реализует алгоритмы управления двигателем, диагностику, защиту и другие функции.
- Коммуникационное программное обеспечение: Обеспечивает обмен данными с другими системами автомобиля по протоколам CAN, LIN, Ethernet и т.д.
III. Этап 3: Разработка Алгоритмов Управления
Разработка эффективных алгоритмов управления требует глубокого понимания процессов, происходящих в двигателе. Для этого используются математические модели двигателя, которые описывают взаимосвязь между различными параметрами, такими как расход воздуха, подача топлива, угол опережения зажигания и выходная мощность. Моделирование позволяет оптимизировать алгоритмы управления и прогнозировать поведение двигателя в различных условиях.
На основе моделей двигателя разрабатываются алгоритмы управления, которые определяют, как ECU должен реагировать на изменения в состоянии двигателя и окружающей среды. Эти алгоритмы включают в себя:
- Управление зажиганием: Оптимизация угла опережения зажигания для обеспечения максимальной мощности и минимального уровня выбросов.
- Управление впрыском топлива: Регулировка количества и момента впрыска топлива для обеспечения оптимального соотношения воздух/топливо (AFR).
- Управление системой EGR: Регулировка количества рециркулирующих отработавших газов для снижения выбросов NOx.
- Управление системой VVT: Регулировка фаз газораспределения для оптимизации работы двигателя в различных режимах.
- Управление турбонаддувом: Регулировка давления наддува для повышения мощности двигателя.
IV. Этап 4: Разработка Программного Обеспечения
Алгоритмы управления реализуются в виде программного кода на языке C или C++. При написании кода необходимо учитывать требования к реальному времени, надежности и безопасности. Важно использовать структурированный подход и следовать стандартам кодирования для обеспечения читаемости и сопровождаемости кода.
После написания кода необходимо провести тщательное тестирование и отладку. Тестирование включает в себя проверку отдельных модулей, интеграционное тестирование и системное тестирование. Для отладки используются различные инструменты, такие как отладчики, эмуляторы и анализаторы трафика. Важно выявлять и устранять все ошибки и дефекты до этапа внедрения.
V. Этап 5: Тестирование и Валидация
Тестирование на стенде позволяет проверить работу ECU в контролируемых условиях. ECU подключается к двигателю, установленному на испытательном стенде, и имитируются различные режимы работы. Во время тестирования измеряются различные параметры, такие как мощность, крутящий момент, расход топлива и уровень выбросов. Результаты тестирования сравниваются с требованиями и спецификациями.
Тестирование на автомобиле позволяет проверить работу ECU в реальных условиях эксплуатации. ECU устанавливается на автомобиль и проводятся испытания на дороге, в городе и на бездорожье. Во время тестирования оцениваются такие параметры, как управляемость, динамика разгона, торможение и комфорт. Результаты тестирования используются для дальнейшей оптимизации алгоритмов управления.
VI. Этап 6: Калибровка и Внедрение
Калибровка ECU – это процесс настройки параметров управления двигателем для конкретного автомобиля и условий эксплуатации. Калибровка выполняется с использованием специализированного программного обеспечения и оборудования. Целью калибровки является достижение оптимальной производительности, топливной экономичности и уровня выбросов.
После калибровки ECU внедряется в автомобиль. Внедрение включает в себя установку ECU, подключение датчиков и исполнительных механизмов, а также программирование ECU. После внедрения проводится финальное тестирование и проверка работоспособности системы.
VII. Перспективы Развития
Использование искусственного интеллекта (ИИ) и машинного обучения (МО) открывает новые возможности для разработки более эффективных и адаптивных ECU. С помощью ИИ и МО можно:
- Оптимизировать параметры управления в режиме реального времени: Адаптировать параметры управления двигателем к изменяющимся условиям эксплуатации, таким как температура окружающей среды, высота над уровнем моря и стиль вождения.
- Прогнозировать неисправности: Анализировать данные с датчиков для прогнозирования неисправностей и предотвращения аварийных ситуаций.
- Разрабатывать самообучающиеся алгоритмы управления: Создавать алгоритмы управления, которые могут самостоятельно обучаться на основе данных, полученных в процессе эксплуатации.
B. Электрификация и Гибридизация
С ростом популярности электрических и гибридных автомобилей возникает необходимость в разработке новых ECU, которые учитывают особенности этих типов двигателей. ECU для электрических и гибридных автомобилей должны обеспечивать:
- Управление электромотором: Регулировка крутящего момента, скорости вращения и напряжения электромотора для обеспечения максимальной эффективности и производительности.
- Управление батареей: Мониторинг состояния батареи, управление зарядкой и разрядкой, а также защита от перегрева и перезаряда.
- Управление гибридной силовой установкой: Координация работы двигателя внутреннего сгорания и электромотора для обеспечения оптимальной топливной экономичности и производительности.
В современном мире разработка системы управления двигателем играет ключевую роль в автомобилестроении. Этот процесс требует глубоких знаний и постоянного совершенствования. Развитие технологий открывает новые горизонты для создания более эффективных и экологичных двигателей.
Описание: Подробное описание процесса разработки системы управления двигателем автомобиля, включая проектирование, тестирование и внедрение системы управления двигателем.
Разработка системы управления двигателем автомобиля (ECU) – это сложный инженерный процесс, который требует глубоких знаний в области мехатроники, электроники, программирования и управления. Современные ECU отвечают за оптимизацию работы двигателя внутреннего сгорания (ДВС), обеспечивая максимальную эффективность, минимальные выбросы и комфортное вождение. Эта статья представляет собой подробное руководство по разработке ECU, охватывающее все этапы от проектирования до тестирования и внедрения, а также рассматривает перспективные направления развития в этой области.
I. Определение Требований и Спецификаций
A. Анализ Требований к Двигателю и Автомобилю
Первым этапом разработки ECU является определение четких и измеримых требований к системе. Эти требования должны учитывать:
- Тип двигателя: Бензиновый, дизельный, гибридный, электрический. Каждый тип двигателя имеет свои особенности, которые необходимо учитывать при разработке ECU. Например, электрические двигатели требуют управления мощностью и зарядом батареи, в то время как ДВС требуют управления топливом, зажиганием и выбросами.
- Экологические нормы: Система должна соответствовать действующим экологическим стандартам (Евро-6, Tier 3, EPA и т.д.). Эти стандарты определяют допустимые уровни выбросов вредных веществ, таких как NOx, CO и HC.
- Требования к производительности: Максимальная мощность, крутящий момент, время разгона, максимальная скорость и другие параметры, которые должны быть достигнуты. Эти требования определяют динамические характеристики автомобиля и его способность выполнять различные задачи.
- Требования к топливной экономичности: Система должна обеспечивать минимальный расход топлива в различных режимах работы (городской цикл, трасса, смешанный цикл). Топливная экономичность является важным фактором для потребителей и влияет на общую стоимость эксплуатации автомобиля.
- Требования к надежности и безопасности: Система должна быть надежной и безопасной в эксплуатации, а также устойчивой к различным внешним воздействиям (температура, вибрация, влажность). Надежность и безопасность являются критически важными для предотвращения аварий и обеспечения долговечности системы.
- Функциональные требования: Управление зажиганием, впрыском топлива, системой рециркуляции отработавших газов (EGR), системой изменения фаз газораспределения (VVT), системой турбонаддува и другими подсистемами двигателя. Эти функции определяют основные возможности ECU и его способность управлять различными аспектами работы двигателя.
B. Разработка Спецификаций ECU
На основе анализа требований разрабатываются детальные спецификации ECU, описывающие его функциональность, производительность и интерфейсы. Спецификации должны быть четкими, измеримыми и проверяемыми. Они включают в себя:
- Функциональные спецификации: Подробное описание каждой функции ECU, включая входные и выходные параметры, алгоритмы управления и логику работы.
- Аппаратные спецификации: Описание аппаратной платформы ECU, включая микроконтроллер, датчики, исполнительные механизмы и интерфейсы связи.
- Программные спецификации: Описание программной архитектуры ECU, включая операционную систему, драйверы устройств, алгоритмы управления и диагностическое программное обеспечение.
- Интерфейсные спецификации: Описание интерфейсов связи ECU с другими системами автомобиля, такими как система управления трансмиссией (TCU), система управления тормозами (ABS) и система управления кузовом (BCM).
- Спецификации по безопасности: Описание механизмов защиты ECU от несанкционированного доступа, ошибок и сбоев.
II. Проектирование Архитектуры ECU
A. Аппаратная Архитектура
Аппаратная архитектура ECU включает в себя выбор микроконтроллера, датчиков, исполнительных механизмов, интерфейсов связи и других электронных компонентов. Выбор компонентов зависит от требований к производительности, функциональности, надежности и стоимости.
- Микроконтроллер: Ядро системы, отвечающее за обработку данных и управление периферийными устройствами. Выбор микроконтроллера зависит от требуемой производительности, объема памяти, количества интерфейсов и энергопотребления. Часто используються микроконтроллеры с архитектурой ARM Cortex-M или Power Architecture.
- Датчики: Датчики температуры, давления, положения коленчатого вала, расхода воздуха, кислорода и другие, которые предоставляют информацию о состоянии двигателя и окружающей среды; Выбор датчиков зависит от требуемой точности, диапазона измерений и надежности.
- Исполнительные механизмы: Форсунки, катушки зажигания, клапаны EGR, дроссельная заслонка и другие, которые управляются ECU для регулирования работы двигателя. Выбор исполнительных механизмов зависит от требуемой скорости реакции, точности и мощности.
- Интерфейсы связи: CAN, LIN, Ethernet и другие, которые используются для обмена данными с другими системами автомобиля. Выбор интерфейсов связи зависит от требуемой скорости передачи данных, надежности и стоимости.
- Схема питания и защиты: Обеспечивает стабильное питание всех компонентов ECU и защиту от перенапряжения, короткого замыкания и других нештатных ситуаций. Схема питания должна быть разработана с учетом требований к энергопотреблению и надежности.
B. Программная Архитектура
Программная архитектура ECU определяет структуру программного обеспечения и взаимодействие между различными модулями. Обычно программное обеспечение ECU состоит из нескольких слоев:
- Базовое программное обеспечение (BSW): Обеспечивает низкоуровневое управление аппаратными ресурсами, такими как память, таймеры и интерфейсы. Часто используется AUTOSAR (Automotive Open System Architecture) для стандартизации BSW и обеспечения совместимости между различными ECU.
- Операционная система реального времени (RTOS): Обеспечивает планирование задач и управление ресурсами в режиме реального времени. RTOS позволяет ECU выполнять несколько задач одновременно с высокой степенью надежности и предсказуемости.
- Прикладное программное обеспечение: Реализует алгоритмы управления двигателем, диагностику, защиту и другие функции. Прикладное программное обеспечение являеться наиболее сложной и важной частью ECU.
- Коммуникационное программное обеспечение: Обеспечивает обмен данными с другими системами автомобиля по протоколам CAN, LIN, Ethernet и т.д. Коммуникационное программное обеспечение должно быть разработано с учетом требований к скорости передачи данных, надежности и безопасности.
III. Разработка Алгоритмов Управления
A. Моделирование Двигателя
Разработка эффективных алгоритмов управления требует глубокого понимания процессов, происходящих в двигателе. Для этого используются математические модели двигателя, которые описывают взаимосвязь между различными параметрами, такими как расход воздуха, подача топлива, угол опережения зажигания и выходная мощность. Моделирование позволяет оптимизировать алгоритмы управления и прогнозировать поведение двигателя в различных условиях.
B; Разработка Алгоритмов
На основе моделей двигателя разрабатываются алгоритмы управления, которые определяют, как ECU должен реагировать на изменения в состоянии двигателя и окружающей среды. Эти алгоритмы включают в себя:
- Управление зажиганием: Оптимизация угла опережения зажигания для обеспечения максимальной мощности и минимального уровня выбросов. Алгоритмы управления зажиганием должны учитывать различные факторы, такие как нагрузка двигателя, скорость вращения коленчатого вала, температура двигателя и детонация.
- Управление впрыском топлива: Регулировка количества и момента впрыска топлива для обеспечения оптимального соотношения воздух/топливо (AFR). Алгоритмы управления впрыском топлива должны учитывать различные факторы, такие как расход воздуха, температура воздуха, температура двигателя и состав отработавших газов.
- Управление системой EGR: Регулировка количества рециркулирующих отработавших газов для снижения выбросов NOx. Алгоритмы управления EGR должны учитывать различные факторы, такие как нагрузка двигателя, скорость вращения коленчатого вала и температура двигателя.
- Управление системой VVT: Регулировка фаз газораспределения для оптимизации работы двигателя в различных режимах. Алгоритмы управления VVT должны учитывать различные факторы, такие как нагрузка двигателя, скорость вращения коленчатого вала и положение дроссельной заслонки.
- Управление турбонаддувом: Регулировка давления наддува для повышения мощности двигателя. Алгоритмы управления турбонаддувом должны учитывать различные факторы, такие как нагрузка двигателя, скорость вращения коленчатого вала и температура турбины.
IV. Разработка Программного Обеспечения
A. Написание Кода
Алгоритмы управления реализуются в виде программного кода на языке C или C++. При написании кода необходимо учитывать требования к реальному времени, надежности и безопасности. Важно использовать структурированный подход и следовать стандартам кодирования для обеспечения читаемости и сопровождаемости кода.
B. Тестирование и Отладка
После написания кода необходимо провести тщательное тестирование и отладку. Тестирование включает в себя проверку отдельных модулей, интеграционное тестирование и системное тестирование. Для отладки используются различные инструменты, такие как отладчики, эмуляторы и анализаторы трафика. Важно выявлять и устранять все ошибки и дефекты до этапа внедрения.
V. Тестирование и Валидация
A. Тестирование на Стенде
Тестирование на стенде позволяет проверить работу ECU в контролируемых условиях. ECU подключается к двигателю, установленному на испытательном стенде, и имитируются различные режимы работы. Во время тестирования измеряются различные параметры, такие как мощность, крутящий момент, расход топлива и уровень выбросов. Результаты тестирования сравниваются с требованиями и спецификациями.
B. Тестирование на Автомобиле
Тестирование на автомобиле позволяет проверить работу ECU в реальных условиях эксплуатации. ECU устанавливается на автомобиль и проводятся испытания на дороге, в городе и на бездорожье. Во время тестирования оцениваются такие параметры, как управляемость, динамика разгона, торможение и комфорт. Результаты тестирования используются для дальнейшей оптимизации алгоритмов управления.
VI. Калибровка и Внедрение
A. Калибровка ECU
Калибровка ECU – это процесс настройки параметров управления двигателем для конкретного автомобиля и условий эксплуатации. Калибровка выполняется с использованием специализированного программного обеспечения и оборудования. Целью калибровки является достижение оптимальной производительности, топливной экономичности и уровня выбросов.
B. Внедрение ECU
После калибровки ECU внедряется в автомобиль. Внедрение включает в себя установку ECU, подключение датчиков и исполнительных механизмов, а также программирование ECU. После внедрения проводится финальное тестирование и проверка работоспособности системы.
VII. Перспективные Направления Развития
A. Искусственный Интеллект и Машинное Обучение
Использование искусственного интеллекта (ИИ) и машинного обучения (МО) открывает новые возможности для разработки более эффективных и адаптивных ECU. С помощью ИИ и МО можно:
- Оптимизировать параметры управления в режиме реального времени: Адаптировать параметры управления двигателем к изменяющимся условиям эксплуатации, таким как температура окружающей среды, высота над уровнем моря и стиль вождения. ИИ и МО могут использоваться для прогнози